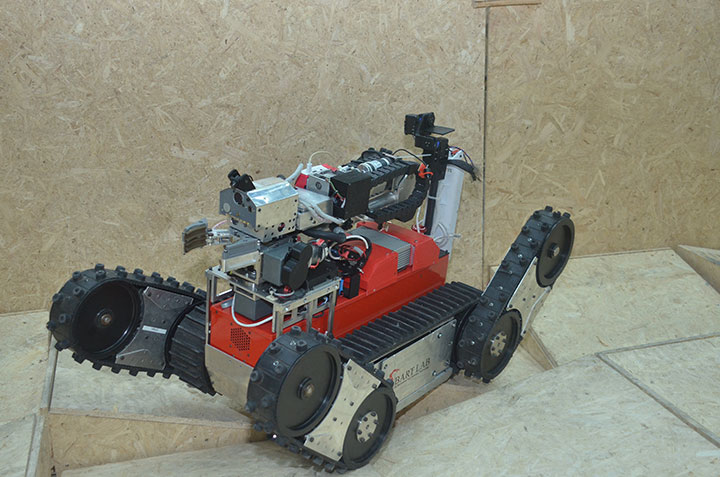


The goal of the urban search and rescue (USAR) robot competitions is to increase awareness of the challenges involved in search and rescue applications, provide objective evaluation of robotic implementations in representative environments, and promote collaboration between researchers. It requires robots to demonstrate their capabilities in mobility, sensory perception, planning, mapping, and practical operator interfaces, while searching for simulated victims in unstructured environments.
See more at: https://rrl.robocup.org/