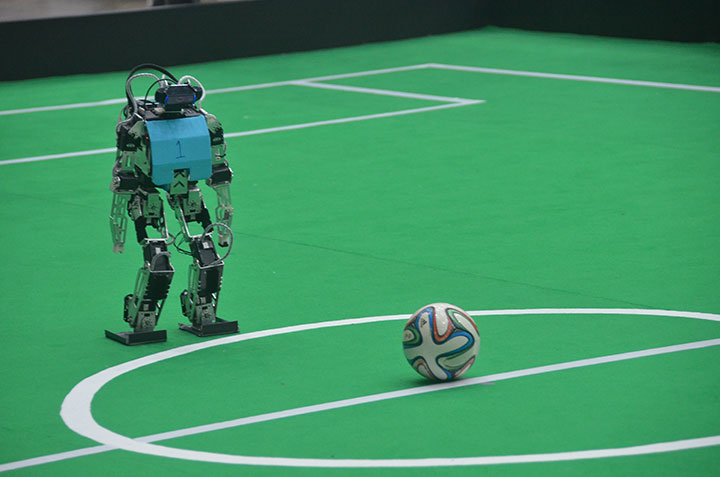
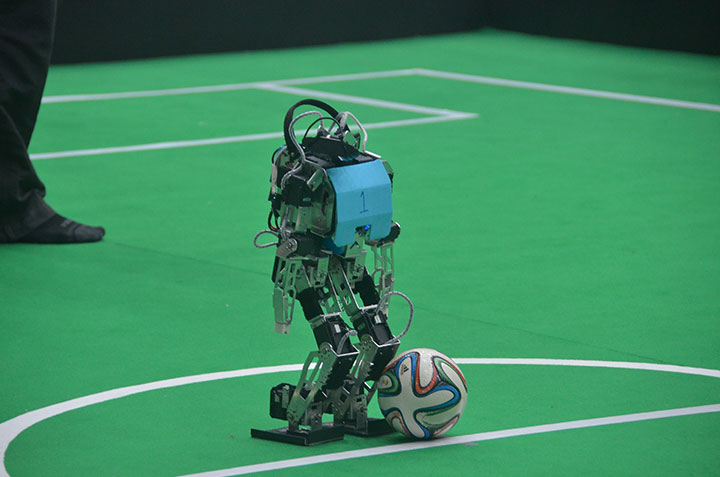
In the Humanoid League, autonomous robots with a human-like body plan and human-like senses play soccer against each other. Unlike humanoid robots outside the Humanoid League the task of perception and world modeling is not simplified by using non-human like range sensors. In addition to soccer competitions technical challenges take place. Dynamic walking, running, and kicking the ball while maintaining balance, visual perception of the ball, other players, and the field, self-localization, and team play are among the many research issues investigated in the Humanoid League. Several of the best autonomous humanoid robots in the world compete in the RoboCup Humanoid League.
See more at: https://humanoid.robocup.org/
Organization
Executive Committee
- keyboard_arrow_rightJacky Baltes
- keyboard_arrow_rightReinaldo Bianchi
- keyboard_arrow_rightLudovic Hofer
- keyboard_arrow_rightMaike Paetzel-Prüsmann
Technical Committee
- keyboard_arrow_rightAzer Babaev
- keyboard_arrow_rightReinhard Gerndt
- keyboard_arrow_rightJasper Güldenstein
- keyboard_arrow_rightAlessandra Rossi
Organizing Committee
- keyboard_arrow_rightJacky Baltes
- keyboard_arrow_rightSaeed Bazargan
- keyboard_arrow_rightReinaldo Bianchi
- keyboard_arrow_rightReinhard Gerndt
- keyboard_arrow_rightLudovic Hofer
- keyboard_arrow_rightJessica Jobski
- keyboard_arrow_rightMaike Paetzel-Prüsmann
- keyboard_arrow_rightAlessandra Rossi
- keyboard_arrow_rightSoroush Sadeghnejad
- keyboard_arrow_rightSergey Semendyaev